2022 Call For Participation
Self Racing Cars is scheduled for October 12-13 2022 at Weathertech Laguna Seca! We will also try to do one or more sensor days in to collect data ahead of the event.
Call For Participation
Please sign up to participate or drop us a line at contact@selfracingcars.com if you have any of the following things to test or demo:
Autonomous vehicles
Drivetrain innovation (electric or otherwise)
Simulation
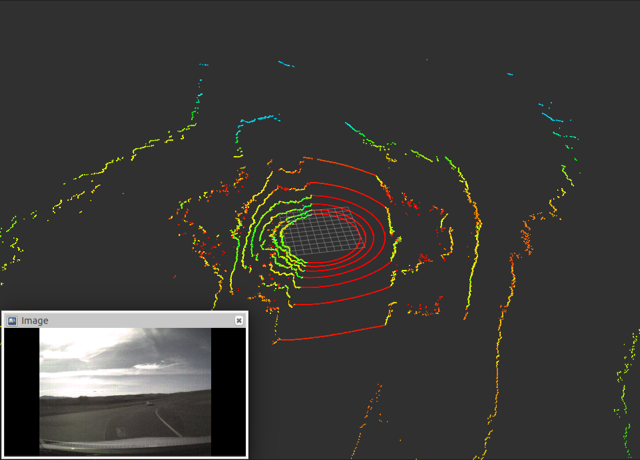
Sensors & Cameras
Software and Algorithms
Teleoperation
Connected Cars (v2v or v2i)
Anything else - probably! Drop us a line.
Independent and hobbyist teams are especially welcome.
We can help match you with a driver and vehicle if you are testing systems, especially sensors.
Confirmed Attendees
NVIDIA (Self-Driving Car Platforms)
Point One Navigation (Spatial Localization for Autonomous Cars)
Voyant Photonics (LIDAR)
Qibus (Remote Vehicle Control)
Faction (Driverless electric vehicles at a fraction of the cost of a car)
donut.c (autonomous RC car)
rerobots (tools for safe learning)
Aeye (LIDAR)
Teledyne FLIR Thermal cameras for the safest AVs and ADAS
Formula 0.1 (autonomous RC car)
Tangram Vision (SDK for sensor fusion: integration, calibration, synchronization, and maintenance)
Undertow (next-generation sensors for autonomous vehicles)
Competition
We will be running timing and scoring for best autonomous laps the full-sized 2.1 mile track. Any vehicle that can make the two mile lap is welcome to attempt. Awards will be given for top performers in each class, with competition classes (e.g. "full-sized vehicle", "gas-powered go-kart", "teleoperated", etc.) to be determined as the event unfolds.
If you are interested in sponsoring a challenge, please contact us at contact@selfracingcars.com.
Data
As with our last events, we will be sharing data collected with various sensors and systems. Developers building on your systems will be able to see what the output looks like in a real-world yet controlled situation.
Sign Up
Participants, please sign up to participate here, or send us an email at contact@selfracingcars.com.
Spectators (including press, investors, students, engineers), please sign up here.
Sponsors should drop us an email at contact@selfracingcars.com.