
Full Autonomous Vehicle Data Capture from VectorAI
VectorAI has released a full dataset from their runs on the track. It includes LIDAR, Accelerometer, GPS, and so on, in the rosbag format.
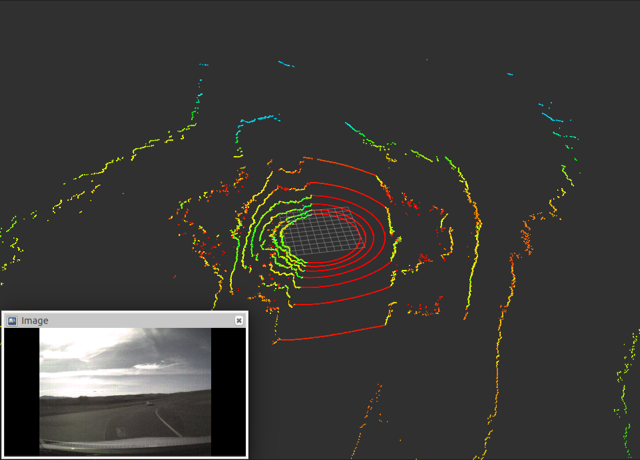
The rosbag dataset contains 13 rostopic messages. The most important topics are /camera/image_color for camera data, /fix for the GPS, /imu/data for the Xsens IMU data and /velodyne_points /velodyne_packets for VLP-16 LiDAR Point Cloud data.
The datasets are available here:
https://archive.org/details/20170402112617
https://archive.org/details/20170401161456ThunderhillCameraImuPclFixNavVelocitySpeedSteering
https://archive.org/details/20170401081311ThunderhillImuGpsPclVelocity
